YOLOv5实时目标检测
基于rknn_model_zoo/examples/yolov5/cpp进行改造,采用gstreamer采集usb摄像头数据,并通过yolov5模型进行实时目标检测。最后通过mediamtx将检测结果推流到rtmp服务器。
环境准备
1、板端rtsp推流 根据rtsp章节,配置gstreamer、mediamtx的运行环境。
2、板端准备好要修改的rknn_model_zoo代码
git clone https://github.com/airockchip/rknn_model_zoo.git --depth 1
3、yolov5模型 根据RKNN上手指南,将yolov5模型转换为rknn模型,并将模型拷贝到板端。
代码修改
可以通过交叉编译rknn_model_zoo的yolov5示例代码,再拷贝到板端进行测试。如果板端CPU性能足够,可以直接在板端进行编译。本文采用板端编译的方式。
做好原有代码的备份,避免修改错误导致编译失败。
1、修改rknn_model_zoo/examples/yolov5/cpp/CMakeLists.txt,添加库的依赖,解决编译错误问题。
CMakeLists.txt
cmake_minimum_required(VERSION 3.10)
project(rknn_yolov5_demo)
if (ENABLE_ASAN)
message(STATUS "BUILD WITH ADDRESS SANITIZER")
set (CMAKE_C_FLAGS_DEBUG "${CMAKE_C_FLAGS_DEBUG} -fno-omit-frame-pointer -fsanitize=address")
set (CMAKE_CXX_FLAGS_DEBUG "${CMAKE_CXX_FLAGS_DEBUG} -fno-omit-frame-pointer -fsanitize=address")
set (CMAKE_LINKER_FLAGS_DEBUG "${CMAKE_LINKER_FLAGS_DEBUG} -fno-omit-frame-pointer -fsanitize=address")
endif ()
set(rknpu_yolov5_file rknpu2/yolov5.cc)
if (TARGET_SOC STREQUAL "rv1106" OR TARGET_SOC STREQUAL "rv1103")
add_definitions(-DRV1106_1103)
set(rknpu_yolov5_file rknpu2/yolov5_rv1106_1103.cc)
#dma
include_directories(${CMAKE_CURRENT_SOURCE_DIR}/../../../3rdparty/allocator/dma)
elseif(TARGET_SOC STREQUAL "rk1808" OR TARGET_SOC STREQUAL "rv1109" OR TARGET_SOC STREQUAL "rv1126")
add_definitions(-DRKNPU1)
set(rknpu_yolov5_file rknpu1/yolov5.cc)
endif()
add_subdirectory(${CMAKE_CURRENT_SOURCE_DIR}/../../../3rdparty/ 3rdparty.out)
add_subdirectory(${CMAKE_CURRENT_SOURCE_DIR}/../../../utils/ utils.out)
set(CMAKE_INSTALL_RPATH "$ORIGIN/lib")
file(GLOB SRCS ${CMAKE_CURRENT_SOURCE_DIR}/*.cc)
# Find GStreamer and its components
find_package(PkgConfig REQUIRED)
pkg_check_modules(GSTREAMER REQUIRED gstreamer-1.0)
pkg_check_modules(GSTREAMER_APP REQUIRED gstreamer-app-1.0)
# Include directories
include_directories(
${CMAKE_CURRENT_SOURCE_DIR}
${LIBRKNNRT_INCLUDES}
${GSTREAMER_INCLUDE_DIRS}
${GSTREAMER_APP_INCLUDE_DIRS}
)
# Add executable
add_executable(${PROJECT_NAME}
main.cc
postprocess.cc
${rknpu_yolov5_file}
)
# Link libraries
target_link_libraries(${PROJECT_NAME}
imageutils
fileutils
imagedrawing
${LIBRKNNRT}
${GSTREAMER_LIBRARIES}
${GSTREAMER_APP_LIBRARIES}
)
if (CMAKE_SYSTEM_NAME STREQUAL "Android")
target_link_libraries(${PROJECT_NAME}
log
)
endif()
if (CMAKE_SYSTEM_NAME STREQUAL "Linux")
set(THREADS_PREFER_PTHREAD_FLAG ON)
find_package(Threads REQUIRED)
target_link_libraries(${PROJECT_NAME} Threads::Threads)
endif()
# Install targets
install(TARGETS ${PROJECT_NAME} DESTINATION .)
install(FILES ${CMAKE_CURRENT_SOURCE_DIR}/../model/bus.jpg DESTINATION ./model)
install(FILES ${CMAKE_CURRENT_SOURCE_DIR}/../model/coco_80_labels_list.txt DESTINATION ./model)
file(GLOB RKNN_FILES "${CMAKE_CURRENT_SOURCE_DIR}/../model/*.rknn")
install(FILES ${RKNN_FILES} DESTINATION model)
2、修改rknn_model_zoo/examples/yolov5/cpp/main.cc,添加gstreamer采集usb摄像头数据,并通过yolov5模型进行实时目标检测。
main.cc
// Copyright (c) 2023 by Rockchip Electronics Co., Ltd. All Rights Reserved.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
/*-------------------------------------------
Includes
-------------------------------------------*/
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <signal.h>
#include <gst/gst.h>
#include <linux/videodev2.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <unistd.h>
#include <gst/app/app.h>
#include <sys/mman.h>
#include "yolov5.h"
#include "image_utils.h"
#include "file_utils.h"
#include "image_drawing.h"
#if defined(RV1106_1103)
#include "dma_alloc.hpp"
#endif
#define BUFFER_COUNT 4 // 通常使用3-4个缓冲区
struct buffer {
void *start;
size_t length;
};
static struct buffer *buffers = NULL;
static unsigned int n_buffers = 0;
static int init_camera(int fd, unsigned int width, unsigned int height)
{
struct v4l2_format fmt = {0};
struct v4l2_requestbuffers req = {0};
struct v4l2_buffer buf = {0};
// Set format
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = width;
fmt.fmt.pix.height = height;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_NV12;
fmt.fmt.pix.field = V4L2_FIELD_NONE;
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0) {
printf("Failed to set format\n");
return -1;
}
// Request buffers
req.count = BUFFER_COUNT;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
if (ioctl(fd, VIDIOC_REQBUFS, &req) < 0) {
printf("Failed to request buffers\n");
return -1;
}
// Allocate buffers
buffers = (struct buffer*)calloc(req.count, sizeof(*buffers));
if (!buffers) {
printf("Failed to allocate buffers\n");
return -1;
}
// Map buffers
for (n_buffers = 0; n_buffers < req.count; ++n_buffers) {
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
if (ioctl(fd, VIDIOC_QUERYBUF, &buf) < 0) {
printf("Failed to query buffer\n");
return -1;
}
buffers[n_buffers].length = buf.length;
buffers[n_buffers].start = mmap(NULL,
buf.length,
PROT_READ | PROT_WRITE,
MAP_SHARED,
fd,
buf.m.offset);
if (buffers[n_buffers].start == MAP_FAILED) {
printf("Failed to mmap buffer\n");
return -1;
}
// Queue buffer
if (ioctl(fd, VIDIOC_QBUF, &buf) < 0) {
printf("Failed to queue buffer\n");
return -1;
}
}
// Start streaming
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if (ioctl(fd, VIDIOC_STREAMON, &type) < 0) {
printf("Failed to start streaming\n");
return -1;
}
return 0;
}
static void uninit_camera(int fd)
{
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
// Stop streaming
ioctl(fd, VIDIOC_STREAMOFF, &type);
// Unmap buffers
for (unsigned int i = 0; i < n_buffers; ++i) {
munmap(buffers[i].start, buffers[i].length);
}
free(buffers);
}
/*-------------------------------------------
Main Function
-------------------------------------------*/
// Global variables for control
static bool g_running = true;
// Signal handler
static void signal_handler(int signo) {
printf("\n Caught signal, exiting...\n");
g_running = false;
}
int main(int argc, char **argv)
{
int ret = 0;
GstElement *pipeline = NULL;
GstElement *appsink = NULL;
GstElement *appsrc = NULL;
rknn_app_context_t rknn_app_ctx;
if (argc != 4) {
printf("%s <model_path> <device_path> <rtsp_port>\n", argv[0]);
printf("Example: %s model.rknn /dev/video41 8554\n", argv[0]);
return -1;
}
const char *model_path = argv[1];
const char *device_path = argv[2];
const int rtsp_port = atoi(argv[3]);
// Initialize GStreamer
gst_init(&argc, &argv);
// Setup signal handler
signal(SIGINT, signal_handler);
// Initialize RTSP pipeline
char pipeline_str[1024];
snprintf(pipeline_str, sizeof(pipeline_str),
"v4l2src device=%s ! "
"videoconvert ! "
"video/x-raw,format=RGB,width=640,height=480 ! "
"tee name=t ! "
"queue ! appsink name=mysink sync=false max-buffers=1 drop=true "
"t. ! queue ! appsrc name=mysrc format=time is-live=true ! "
"videoconvert ! video/x-raw,format=NV12 ! "
"mpph264enc bps=2000000 ! h264parse ! "
"rtspclientsink location=rtsp://localhost:%d/test sync=false",
device_path, rtsp_port);
pipeline = gst_parse_launch(pipeline_str, NULL);
if (!pipeline) {
printf("Failed to create pipeline\n");
ret = -1;
} else {
// Get elements
appsink = gst_bin_get_by_name(GST_BIN(pipeline), "mysink");
appsrc = gst_bin_get_by_name(GST_BIN(pipeline), "mysrc");
if (!appsink || !appsrc) {
printf("Failed to get elements\n");
ret = -1;
} else {
// Configure appsrc
GstCaps *caps = gst_caps_new_simple("video/x-raw",
"format", G_TYPE_STRING, "RGB",
"width", G_TYPE_INT, 640,
"height", G_TYPE_INT, 480,
"framerate", GST_TYPE_FRACTION, 30, 1,
NULL);
g_object_set(G_OBJECT(appsrc),
"caps", caps,
"format", GST_FORMAT_TIME,
NULL);
gst_caps_unref(caps);
// Set pipeline state to playing
GstStateChangeReturn state_ret = gst_element_set_state(pipeline, GST_STATE_PLAYING);
if (state_ret == GST_STATE_CHANGE_FAILURE) {
printf("Failed to start pipeline\n");
ret = -1;
}
}
}
if (ret == 0) {
memset(&rknn_app_ctx, 0, sizeof(rknn_app_context_t));
init_post_process();
ret = init_yolov5_model(model_path, &rknn_app_ctx);
if (ret != 0) {
printf("init_yolov5_model fail! ret=%d\n", ret);
}
}
if (ret == 0) {
// Main processing loop
GstSample *sample = NULL;
struct timespec last_detect_time = {0, 0};
const int detect_interval_ms = 100; // 10fps for detection
// 预分配 640x640 的缓冲区
size_t model_input_size = 640 * 640 * 3;
unsigned char* model_input_buf = (unsigned char*)malloc(model_input_size);
while (g_running && model_input_buf) {
struct timespec current_time;
clock_gettime(CLOCK_MONOTONIC, ¤t_time);
long diff_ms = (current_time.tv_sec - last_detect_time.tv_sec) * 1000 +
(current_time.tv_nsec - last_detect_time.tv_nsec) / 1000000;
sample = gst_app_sink_pull_sample(GST_APP_SINK(appsink));
if (sample) {
GstBuffer *buffer = gst_sample_get_buffer(sample);
GstMapInfo map;
if (gst_buffer_map(buffer, &map, GST_MAP_READ)) {
// 只在间隔时间到达时执行目标检测
if (diff_ms >= detect_interval_ms) {
// Create image buffer for detection
image_buffer_t src_image;
memset(&src_image, 0, sizeof(image_buffer_t));
src_image.width = 640;
src_image.height = 480;
src_image.format = IMAGE_FORMAT_RGB888;
src_image.size = src_image.width * src_image.height * 3;
src_image.virt_addr = (unsigned char *)map.data;
// 创建目标图像缓冲区
image_buffer_t dst_image;
memset(&dst_image, 0, sizeof(image_buffer_t));
dst_image.width = 640;
dst_image.height = 640;
dst_image.format = IMAGE_FORMAT_RGB888;
dst_image.size = model_input_size;
dst_image.virt_addr = model_input_buf;
// 手动进行图像缩放和填充
// 1. 清空目标缓冲区
memset(dst_image.virt_addr, 114, dst_image.size); // 114 是 YOLOv5 默认的填充值
// 2. 复制并居中放置原始图像
int padding_top = (640 - 480) / 2;
for (int y = 0; y < 480; y++) {
memcpy(dst_image.virt_addr + ((y + padding_top) * 640 * 3),
src_image.virt_addr + (y * 640 * 3),
640 * 3);
}
// 3. 执行目标检测
object_detect_result_list od_results;
memset(&od_results, 0, sizeof(object_detect_result_list));
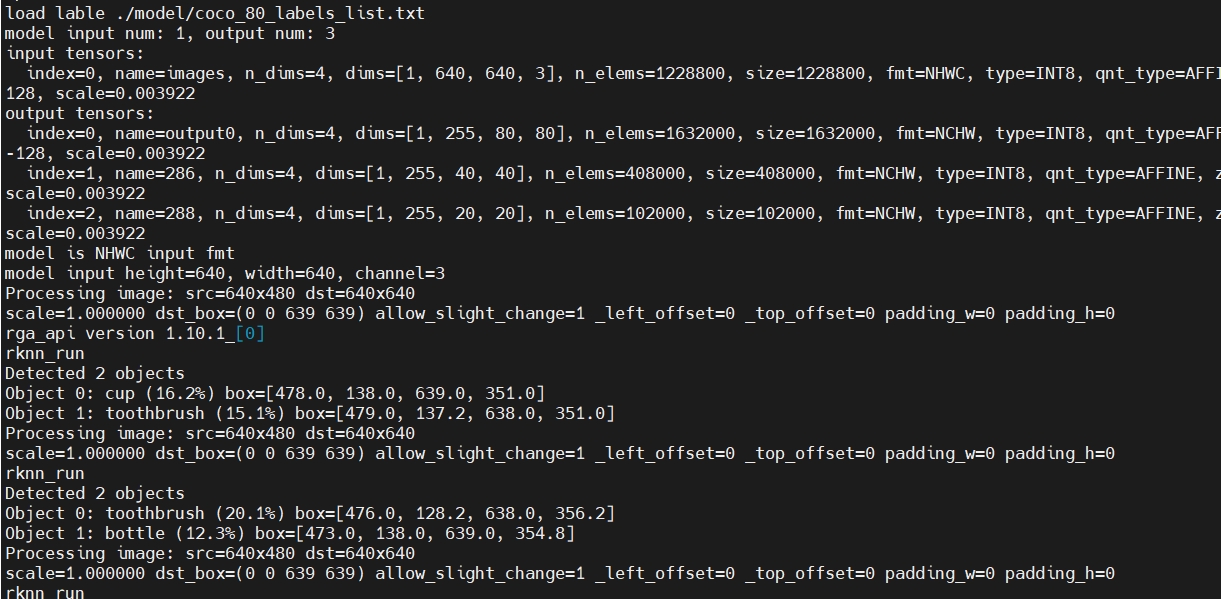
printf("Processing image: src=%dx%d dst=%dx%d\n",
src_image.width, src_image.height,
dst_image.width, dst_image.height);
ret = inference_yolov5_model(&rknn_app_ctx, &dst_image, &od_results);
if (ret == 0) {
printf("Detected %d objects\n", od_results.count);
// 创建一个新的图像缓冲区用于绘制结果
image_buffer_t display_image;
memset(&display_image, 0, sizeof(image_buffer_t));
display_image.width = src_image.width;
display_image.height = src_image.height;
display_image.format = IMAGE_FORMAT_RGB888;
display_image.size = src_image.size;
display_image.virt_addr = (unsigned char*)malloc(src_image.size);
if (display_image.virt_addr) {
// 复制原始图像
memcpy(display_image.virt_addr, src_image.virt_addr, src_image.size);
// 调整检测框坐标并绘制
for (int i = 0; i < od_results.count; i++) {
object_detect_result *det_result = &(od_results.results[i]);
// 将检测框坐标从640x640映射回640x480
float scale_y = 480.0f / 640.0f;
float box_left = det_result->box.left;
float box_top = (det_result->box.top - padding_top) * scale_y;
float box_right = det_result->box.right;
float box_bottom = (det_result->box.bottom - padding_top) * scale_y;
// 确保坐标在有效范围内
box_left = std::max(0.0f, std::min(box_left, 639.0f));
box_top = std::max(0.0f, std::min(box_top, 479.0f));
box_right = std::max(0.0f, std::min(box_right, 639.0f));
box_bottom = std::max(0.0f, std::min(box_bottom, 479.0f));
// 打印调试信息
printf("Object %d: %s (%.1f%%) box=[%.1f, %.1f, %.1f, %.1f]\n",
i,
coco_cls_to_name(det_result->cls_id),
det_result->prop * 100,
box_left, box_top, box_right, box_bottom);
// 只有当坐标有效时才绘制
if (box_right > box_left && box_bottom > box_top) {
// 使用项目自带的绘制函数
draw_rectangle(&display_image,
(int)box_left,
(int)box_top,
(int)(box_right - box_left),
(int)(box_bottom - box_top),
COLOR_RED, 3); // 增加线条宽度到 3
// 绘制标签背景
int text_padding = 4;
char text[256];
snprintf(text, sizeof(text), "%s %.1f%%",
coco_cls_to_name(det_result->cls_id),
det_result->prop * 100);
// 计算文本位置,确保在图像范围内
int text_y = (int)box_top - 30; // 增加与边框的距离
text_y = std::max(text_y, text_padding); // 确保不超出上边界
// 绘制黑色背景框
draw_rectangle(&display_image,
(int)box_left - text_padding,
text_y - text_padding,
strlen(text) * 15, // 估算文本宽度
30, // 增加文本高度
COLOR_BLACK,
-1); // -1 表示填充矩形
// 绘制文本,增大字号
draw_text(&display_image,
text,
(int)box_left,
text_y,
COLOR_WHITE, // 改为白色文本
12); // 增大字号到 4
}
}
// 创建新的 GStreamer 缓冲区并推送到 appsrc
GstBuffer *out_buffer = gst_buffer_new_allocate(NULL, src_image.size, NULL);
if (out_buffer) {
GstMapInfo out_map;
if (gst_buffer_map(out_buffer, &out_map, GST_MAP_WRITE)) {
// 复制带有检测框的图像
memcpy(out_map.data, display_image.virt_addr, src_image.size);
gst_buffer_unmap(out_buffer, &out_map);
// 设置时间戳
GST_BUFFER_PTS(out_buffer) = GST_BUFFER_PTS(buffer);
GST_BUFFER_DURATION(out_buffer) = GST_BUFFER_DURATION(buffer);
GST_BUFFER_DTS(out_buffer) = GST_CLOCK_TIME_NONE;
// 推送到 appsrc
GstFlowReturn flow_ret = gst_app_src_push_buffer(GST_APP_SRC(appsrc), out_buffer);
if (flow_ret != GST_FLOW_OK) {
printf("Failed to push buffer to appsrc: %d\n", flow_ret);
}
} else {
gst_buffer_unref(out_buffer);
}
}
// 释放显示缓冲区
free(display_image.virt_addr);
}
}
last_detect_time = current_time;
}
gst_buffer_unmap(buffer, &map);
}
gst_sample_unref(sample);
}
usleep(5000); // 5ms
}
// 清理预分配的缓冲区
if (model_input_buf) {
free(model_input_buf);
}
}
// Cleanup
deinit_post_process();
release_yolov5_model(&rknn_app_ctx);
if (appsrc) {
gst_object_unref(appsrc);
}
if (appsink) {
gst_object_unref(appsink);
}
if (pipeline) {
gst_element_set_state(pipeline, GST_STATE_NULL);
gst_object_unref(pipeline);
}
return ret;
}
板端编译
进入rknn_model_zoo目录后,执行如下命令进行编译:
./build-linux.sh -t rk3588 -a aarch64 -d yolov5
编译完成后,在rknn_model_zoo/install/rk3588_linux_aarch64/rknn_yolov5_demo目录下会生成rknn_yolov5_demo可执行文件。
板端运行
在确保rknn模型放到板端,且摄像头设备正常连接的情况下,执行命令运行mediamtx:
./mediamtx
在mediamtx运行后,执行如下命令运行rknn_yolov5_demo:
./rknn_yolov5_demo model/yolov5s.rknn /dev/video41 8554
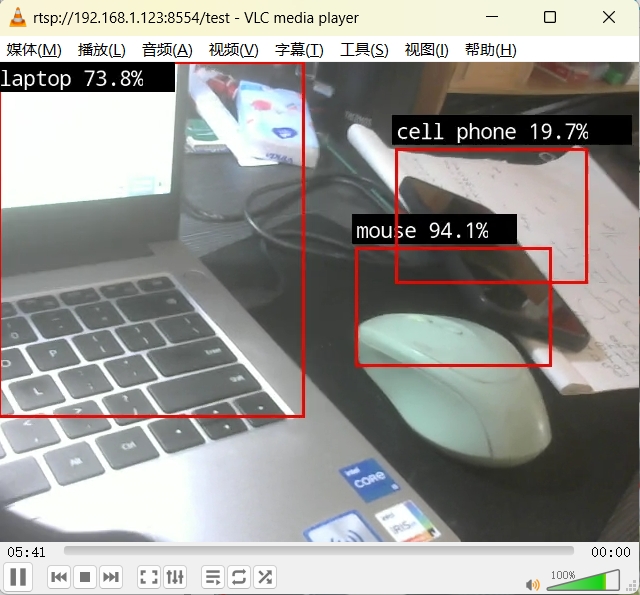
通过vlc播放器,输入rtsp://localhost:8554/test,即可看到摄像头画面。
- 如果摄像头没有画面,请检查摄像头是否正常连接。
- 如果画面显示不正常,请检测数据格式是否正确。
- 如果想用其他模型,请修改rknn_yolov5_demo中的模型路径、名称
- 本项目代码仅供参考,如果需要更复杂或稳定的目标检测,请自行修改代码。